
MKZ4 ユーザーガイド
紙マニュアルダウンロード
- MKZ4(PDF)
- 1次出荷分のマニュアルに誤記がございました。
- 裏面 「単四乾電池」の文字が不要です。
- 部品表 M2 の 4p + 3p + 11pin = 18p 正しくは 4p + 3p + 10pin = 17pです。
- 1次出荷分のマニュアルに誤記がございました。
回路図ダウンロード
組み立て・利用に最低限必要な道具
MKZ4
- 工具
- はんだゴテ
- はんだ
- 直径3mmの穴を開ける道具(いづれか1つ)
- ピンバイス
- 電気ドリル
- ハンドドリル
- ※ワイルドミニ四駆のボディに穴を開けます
- ドライバー プラス1番のサイズ
- ニッパー
- ※ボディを加工するのに使用
- ピンセット
- MKZ4WK
- ※もしくは、3.3VシリアルUSB変換
- パソコン
- ※PCのUSBポートにMKZ4WK,または3.3VシリアルUSB変換を接続し、それを使用してソフトウェア書き込みを行います
- スマートフォン、ブラウザが使えるタブレット
- 単4形電池 × 3本
MKZ4WK
- はんだゴテ
- はんだ
ソフトウェア
- ソースコードダウンロード
https://github.com/cerevo/MKZ4 - Arduino IDEダウンロード
https://www.arduino.cc - Arduino Previous IDE Release Ver1.6.8をダウンロード
https://www.arduino.cc/en/Main/OldSoftwareReleases#previous - Arduino ESP8266追加ボードマネージャーURL
http://arduino.esp8266.com/stable/package_esp8266com_index.json
制作Tips
- 「MKZ4〜失われた夏を取り戻せ!Wi-Fiモジュールはんだ付け編」
https://tech-blog.cerevo.com/archives/3022/
FAQ
Q. 推奨のはんだゴテはありますか?
A.
ニクロムヒータータイプのものよりも、セラミックヒータータイプのものがお勧めです。
MKZ4TSに同梱されておりましたはんだゴテは、HAKKO製の「No.984-01」となります。
Q. Macでもプログラムの書き込みはできますか?
A.
Mac OS X Lion(10.7)以降に対応しています。
その他、書き込みに関する詳しい解説は「徹底解説!MKZ4ガイドブック」(Kindleストア)もあわせてご覧ください。
Q. Windows 10でもプログラムの書き込みはできますか?
A.
はい、Windows 10でも動作確認をしています。
Q. 単4乾電池3本でどれぐらいの時間うごかせますか?
A.
走行環境と使用する電池で大きく異なりますが、2〜6時間程度を目安にしてください。
※一般に販売されているアルカリ電池は、大きく性能にばらつきがあるため概算となります。
※電池残量が少なくなってくると、走行スピードが遅くなったり、Wi-Fiが途切れがちになることがあります。その際は3本とも新品の電池に交換してください。
Q. Wi-Fiはどれぐらいの距離まで届きますか?
A.
お客様の無線環境により左右されますが、室内で目視できる範囲(10m以内)を目安にご利用ください。
Q. MKZ4に対応しているワイルドミニ四駆の車種を教えてください。
A.
動作確認済みの車種は以下になります。
- ランチボックス Jr.
- ワイルドザウルス
- ニッサン キングキャブ Jr.
- ブルヘッド Jr.
- トヨタ ハイラックス モンスターレーサー Jr.
- トヨタ ハイラックス サーフ
- ニッサン テラノ ’93 パリダカ仕様 (チーム NOK JATCO)
- マンモスダンプ
- ダッシュCBW コマンドザウルス
Q. スマートフォンからの操作は、どのブラウザからでも動かすことはできますか?
A1.
以下のブラウザで動作確認をしております。
- Android : Chrome 51.0 Mozilla Firefox 47.0
- iOS : Safari 9.0(推奨)、Chrome
iOSのChromeでは下方向にスライドしてから、上方向にスライドするとリロードをする機能があり、操作の妨げになります。この機能を無効化する方法は以下URLをご参考ください。
http://oshiete.goo.ne.jp/qa/9155474.html
A2.
PSVitaのブラウザは対応はしておりません。
Q. 作成するのは何歳からが対象でしょうか?
A.
電子部品のはんだづけ作業とPCからのソフトウェア書き込み作業がありますので、15歳以上を目安として対象です。大人の方のサポートがあれば、15歳未満の方でも組み立ては可能です。
Q. 完成までの作業時間目安はどれぐらいですか?
A.
電子工作初心者の方は1日、電子工作に慣れてる方は3〜4時間を目安にしてください。
Q. パーツ壊れた場合どうすればいいですか?
A.
Cerevoサポートまでメールにてお問い合わせください。土日祝日は返信対応業務を行っておりません。また、電話での受付は行っておりません。
サポート窓口Eメール宛先 support@cerevo.com
Q. ソフトウェアが書き込めません。
A1.
電源OFF状態でCN3のショートピンがD側に接続されていることを確認してから、電源を入れてください。
A2.
ESP8266が正常に動いていない可能性があります。テスタなどの測定機器を使って、以下の点を確認しましょう。テスタの使い方はKindleのガイドブックにも記載してあります。
- 電源3.3V(CN3の1ピンB側)や電池電圧4.5V程度( TP5)とGND(CN3の3ピン)はショートしていないか?
- 電源3.3V(CN3の1ピンB側)とGND(CN3の3ピン)間の電圧は3.3V出力されてているか?
- 電池電圧( TP5)とGND(CN3の3ピン)の電圧は4.5V程度出力されているか?
- ESP8266(M1)のEN(2ピン)とRESET(15ピン)、IO2 (7ピン)の電圧は3.3V出ているか?
- 電源が3.3V出ていない場合は、特に下記のはんだ付けを確認してください。IC2/C1/C2/C9。
- 電源電圧が正常でも書き込めない場合は、ESP8266(M1)の周辺部部品はきちんとはんだ付けされていない可能性があります。M1自体はもちろん、特に、R1/R2/R6/R7/C6/C7/C10/CN1/CN3を確認ください。
A3.
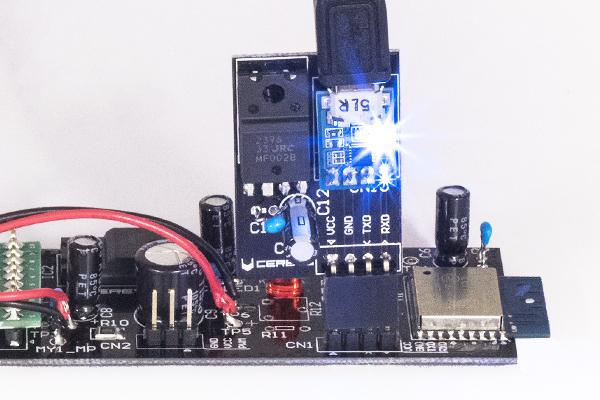
ライター基板の差し込んでいる方向をご確認ください。
ライター基板の表面が、MKZ4基板の外側を向くように差し込まれている状態で書き込みが可能です。
Q. Arduinoでスケッチをコンパイルすると、コンパイルエラーになります。
A1.
Mac版の一部環境によって起こる報告が来ております。お手数ですが、Arduino IDEのバージョンを1.6.5にダウングレードしてコンパイルしてみてください。
A2.
Windowsをお使いの場合、Arduino IDEのバージョンがver 1.6.8以外の場合、弊社では動作確認を行っておりませんので動作保証外となります。
A3.
「Cerevo_MKZ4.ino」をコンパイルする際は、ツール→マイコンボードからGeneric ESP8266 Moduleを選択してください。
Q. ボードマネージャーのVer2.3.0をコンパイルしても動作しますか?
A.
Ver2.3.0でも動作します。
Cerevo_MKZ4.inoはArduino IDE ver 1.6.8でWindows版、Mac版共に動作確認をしております。
Q. ミニ四駆のWi-Fiに繋がりません。
A.
スマホやタブレットでSSID : ”MKZ4” が見えない場合、Wi-Fiモジュール(ESP8266)が正常に動いていない可能性があります。以下の点を確認しましょう。
- 電源OFFの状態でジャンパーピンは”B”側に接続した上で、電源を入れたか?
- Arduinoスケッチのコンパイル・書き込みに成功したか?
- 電源3.3V(CN3の1ピンB側)や電池電圧4.5V程度( TP5)とGND(CN3の3ピン)はショートしていないか?
- 電源3.3V(CN3の1ピンB側)とGND(CN3の3ピン)間の電圧は3.3V出力されてているか?
- 電池電圧( TP5)とGND(CN3の3ピン)の電圧は4.5V程度出力されているか?
- ESP8266(M1)のEN(2ピン)とRESET(15ピン)、IO2 (7ピン)の電圧は3.3V出ているか?
- 電池BOXの電源を切ってから、MKZ4WK基板を繋いで、Arduino IDEのシリアルコンソールからログを見てみましょう
Q. 192.168.4.1にアクセスしましたが、ミニ四駆が反応しません。
A.
電源が入っていることを確認してください。一旦電源をOFFにしてから、ジャンパーピンをB側に接続し直して、電源を入れ直してください。また、スマートフォンのWi-Fiの接続先名称(SSID)がMKZ4となっていることを確認してください。
Q. スマートフォンから接続したあと、操作しても左右に曲がりません。
A.
サーボモータが正しく動作していない可能性があります。
- “CN2″の接続向きが、正しいか確認しましょう。
- 電池から出ている線の”+”(TP5),”-“(TP6)の電圧が4.5V(電池3本分)出ているかテスタで確認しましょう。
- 抵抗やコンデンサなどの部品が正しくはんだ付けされているか確認しましょう。左右の動作だけできない場合は、特にCN2とR7のはんだ付けを確認して下さい。
Q. 左右どちらかしか曲がりません。
A1.
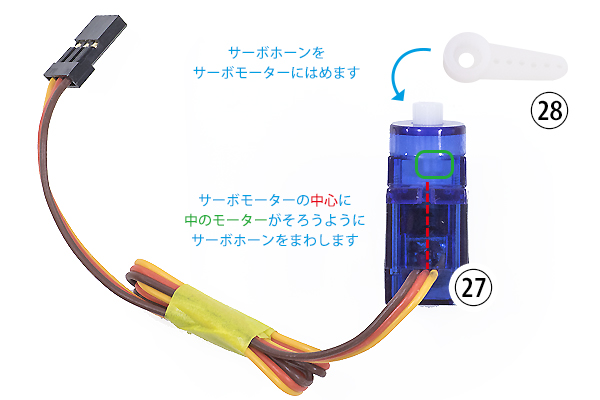
サーボモータの中心角度がずれている可能性があります。サーボモータの中心角度を合わせてから、サーボホーンを取り付けてください。図を参考に、青色のサーボのギア位置を中心に調整します。
A2.
スマートフォンで前方に向けてスワイプして、MKZ4に前進指示をします。すると現在の前進の位置にサーボが動きますので、そこで停止して、電源を切ります。サーボホーンが中心角度からずれていたら、中心角度に合わせて取り付けます。
Q. 左右どちらにステアリングを切ると、電池BOXとタイヤが当たってしまい回りません。
A1.
電池BOXの取り付け位置が前方過ぎる可能性があります。少し後ろ側に取り付け直してください。
A2.
サーボのステアリング角度が深くなり過ぎている可能性があります。
ソフトウェアの以下の90°を中心とした定数の値を調整してください。
- #define servo_left 左側ステアリング角度
- #define servo_right 右側ステアリング角度
(例)
右側のステアリング角度を5°浅くする
#define servo_right 115 -> 110
Q. サーボホーンの位置が中心にならず、まっすぐに走らない。
A.
サーボホーンの軸の取り付けの際に、溝の関係で中心を外れることがあります。
その場合、「Cerevo_MKZ4.ino」から、ソフトウェア上でサーボの中心を調整してください。60行目の「int offset」の値を変更することで調整できます。
- int offset = 0;
(例)
左に5度ずらしたい場合は offset = -5;
右に10度ずらしたい場合は offset = 10;
Q. 前後に走りません。
A1.
モーターをボディから取り外した状態で、電源を入れてモーターが回転するかお確かめください。この時点でモーターが回転しない場合は、A2に進んでください。
モーターが正常に回転するものの、後輪が動作しない場合は次のことを行ってください。
- モーターに接続されたピニオンギアが、適切な位置に取り付けられていることを確認してください。ピニオンギアの取り付けは「ミニ四駆」付属の専用部品をご利用ください。
- ギアが固いことがありますので、ギアにグリスを十分に塗布してください。
A2.
スケッチが書き込めてもモータドライバが正しく半田付けされていない可能性があります。テスタを用いて以下の接続が問題ないかを確認して下さい。
- 電源(M3の4ピンと5ピン)は4.5V(電池3本分)の電圧が出ているか?
- はんだ付けは特に下記を確認してください。M2/M3/R10/R3/R4/C3/C8。
- オシロスコープ(波形を測定する機器)をお持ちの方は、スマホで前進後進操作をしながら、M3の9/10ピンの波形を見てI2C波形が出ているか確認してください。I2Cの仕組みや波形については、Kindleガイドブックにも記載しています。
Q. 一度動かしたら止まらなくなりました。
A1.
Wi-Fiが切断された可能性があります。スマートフォンのWi-Fi設定を再確認してください。
A2.
スマートフォンとの通信を失敗した可能性があります。もう一度、スマートフォンの画面をタップして再度停止指示を送ってください。
Q. CN3 D/Bと書かれているピンヘッダーに指すジャンパーピンが緩いですが、動作に問題ありますか?
A.
ソフトウェアを書き込む際にESP8266のモード設定に使用するピンになります。通常起動はB側に接続して、電源を入れます。ソフトウェアを書き込む際はD側に接続してソフトウェアをESP8266に書き込みます。ソフトウェアが書き込めれば緩くても問題ありません。
| B側 | D側 |
|---|---|
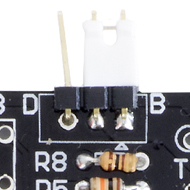 |
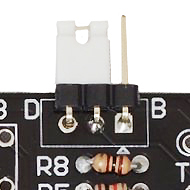 |
Q. ESP8266(M1)のはんだ付けが難しく、ずれたり隣のピンとショートしてしまいます。
A.
はんだ付けが難しい場合は、以下の内容をお試しください。
- はんだ付けの前に基板にフラックスを塗る
- マスキングテープでM1と基板を仮固定する
- 換気に気をつけながら、0.65mmなど細い鉛入りはんだを使う
- 温度調整可能なはんだこてを使う
また詳細なM1のはんだ付け方法は「徹底解説!MKZ4ガイドブック」(Kindleストア)でも解説しています。
Q. はんだ付けする箇所を間違えました。どうすればいいでしょう?
A.
印字されている箇所とはちがう箇所に電子パーツ等をつけた場合に、基板が正しく動作しません。誤ってはんだ付けした場合は、以下の手順ではんだ付けの修正を試みてください。
例:TP5とTP6のワイヤーを逆につけてしまった場合
- ピンセットでワイヤーをつまみ、その状態のままはんだ付けされた基板をはんだごてで加熱し、はんだを溶かします。
- はんだが溶けたらつまんでいるピンセットでリード線を穴から引き抜き、はんだごてを離します。
- それぞれのワイヤーをはずしたら、はずすのとは逆の手順で、はんだごてで基板をあたためてはんだを溶かし、そこにリード線を差し込みます。
- TP5に赤ワイヤー、TP6に黒ワイヤーがはんだ付けされれば修正完了です。
Kindleで販売している「徹底解説!MKZ4ガイドブック」初版にて、TP5/TP6のはんだ付けに関する表記で誤りがございました。詳細はガイドブックページをご参照ください。